
Аквапланирование (гидропланирование, гидроскольжение) – это явление, которое может возникнуть при движении автомобиля по дороге, покрытой слоем осадков (вода, слякоть или мокрый снег). Аквапланирование может серьёзно ухудшить управляемость автомобиля при движении и уменьшить эффективность торможения.
Существует три вида аквапланирования:
- динамическое аквапланирование,
- паровое аквапланирование, вызванное испарением воды в зоне контакта шин с дорогой и перегревом резины,
- вязкое аквапланирование, вызванное вязкостью воды.
Для автомобилей, как правило, характерно динамическое аквапланирование, тогда как паровое и вязкое аквапланирование может иметь место преимущественно у самолетов при движении по взлетно-посадочной полосе.
При динамическом аквапланировании колесо, катящееся без торможения по дороге, покрытой слоем жидкости, сдвигает воду, лежащую на его пути. Реакцией массы перемещаемой жидкости, будет возникновение гидродинамического давления, которое будет действовать на поверхность шины и поднимать колесо вверх. На некоторой скорости, называемой скоростью аквапланирования, подъёмная сила жидкости становится равной нагрузке на колесо, и колесо теряет контакт с поверхностью дороги, как показано на рисунке ниже.
В 1963 году инженер NASA Горн провел эксперименты над гладкими и с протектором автомобильными и самолетными шинами при средней толщине пленки воды 7.62 мм [1], и получил эмпирическую зависимость скорости аквапланирования от давления в шинах, известную далее как формула Горна. В 1967 году эмпирическая зависимость Горна вошла в изданную в США книгу Коллинза и Морриса «Анализ дорожно-транспортных происшествий», которая в 1971 году в сокращенном виде была переведена и издана на русском языке [2], и с тех пор используется как методическое пособие.
Гидроскольжение по Коллинзу и Моррису
Аквапланирование рассматривается Коллинзом и Моррисом как гидроскольжение автомобиля, возникающее при движении автомобиля на повороте мокрой дороги, когда автомобиль или начинает отклоняться от криволинейной траектории и перестает быть управляемым, в результате чего может столкнуться с другим транспортным средством. Они указывают на то, что зная о том, что величина коэффициента сцепления на мокром асфальте вполне достаточна для нормального движения автомобиля, эксперт-автотехник обычно объясняет такие случаи тем, что водитель не справился с управлением.
Однако для таких происшествий имеются технические причины, так как автомобиль, движущийся по мокрой дороге, может начать скользить по верхней части пленки воды подобно скольжению на водных лыжах. Его передние колеса скользят по поверхности водяной пленки, лишь частично выдавливая ее, в то время как шины задних колес все еще движутся по поверхности асфальта, так как половину работы по выдавливанию воды перед задними шинами сделали передние шины.
Совершенно очевидно, что гидроскольжение шин оказывает отрицательное влияние на управляемость и тормозные качества автомобиля. Что касается торможения, то при гидроскольжении в торможении участвуют только задние колеса автомобиля, так как передние колеса при этом продолжают скользить по водяной пленке в блокированном состоянии, не касаясь дорожного покрытия. Поэтому эффективность тормозов в этом случае уменьшается примерно вдвое и, следовательно, расстояние, необходимое для остановки автомобиля, увеличивается примерно в полтора раза. Как только скорость автомобиля станет ниже критической, при которой происходит гидроскольжение, передние шины входят в контакт с поверхностью дороги, и восстанавливается нормальная эффективность тормозов. Поэтому увеличение тормозного пути при гидроскольжении может оказать влияние на возможность столкновения автомобилей при скоростях движения выше критической скорости гидроскольжения. При гидроскольжении поворот рулевого колеса и управляемых колес не обеспечивает изменение направления движения автомобиля, потому что шины скользят по воде, не контактируясь с поверхностью дороги, а при скользящих колесах автомобиль неуправляем.
При гидроскольжении автомобиль может не вписаться в кривую на закруглении дороги и попасть в кювет или столкнуться со встречным автомобилем.
Имеются определенные условия, при которых возникает гидроскольжение. Первым условием является толщина слоя воды на дороге. Исследования (до 1967 года – года издания книги) показали, что если толщина слоя воды на дорожном покрытии не достигает определенной величины, то гидроскольжение не возникает. Эту толщину слоя воды довольно сложно определить, так как ее величина зависит от многих факторов, таких, как качество поверхности дороги и рисунка беговой дорожки протектора шины. Толщина пленки воды при гидроскольжении составляет 5-7.5 мм.
На шероховатой поверхности (второе условие) дороги требуется большая толщина пленки воды для гидроскольжения, чем на гладкой. Ввиду высоких удельных давлений в зоне контакта шины с шероховатой цементобетонной поверхностью при наличии впадин и выступов на такой дороге гидроскольжения почти не возникает.
Третьим фактором, влияющим на гидроскольжение, является качество системы водостока. При хорошо организованном водостоке на поверхности дороги остается такое количество воды, которое недостаточно для появления гидроскольжения.
Четвертым фактором является наличие поперечных канавок на цементобетонном дорожном покрытии. Эти канавки играют такую же роль, как выступы и впадины на дорожной поверхности, и служат для отвода воды из-под шины, уменьшая возможность возникновения гидроскольжения.
Пятым фактором является конструкция рисунка беговой дорожки протектора шины, которая оказывает влияние на скорость гидроскольжения. Более крупный рисунок протектора шины требует большей скорости, при которой начнется гидроскольжение, чем мелкий и более плотный рисунок беговой дорожки шины. Потеря тормозной эффективности при гидроскольжении больше свойственна шинам с мелким, плотным рисунком протектора, чем с крупным, так как глубокие большие канавки рисунка протектора позволяют скапливаться воде в них, даже если толщина слоя воды на поверхности дороги выше глубины канавок рисунка протектора, что, в конечном счете, увеличивает скорость появления гидроскольжения.
Шестым и очень важным параметром является величина давления воздуха в шине.
При достижении автомобилем критической скорости гидроскольжения при прямолинейном движении у водителя создается впечатление нормального поведения автомобиля, но это впечатление меняется, как только появляется необходимость изменить направление движения автомобиля и резко затормозить, так как при этом автомобиль не управляется.
Критическая скорость гидроскольжения определяется эмпирической формулой
![]()
где vP – критическая скорость гидроскольжения, км/ч, P – давление воздуха в шине, кг/см2.
Еще раз следует отметить, что приведенная выше эмпирическая зависимость Горна получена в 1963 году для определенных условий толщины водяной пленки, шероховатости асфальта, и конструкции шин, характерных для взлетно-посадочных полос самолетов и самолетных шин. С тех пор существенное изменение претерпела как конструкция, так и технология изготовления автомобильных шин, о чем будет сказано ниже.
По этой формуле, если давление в шинах составляет 2 кг/см2, критическая скорость аквапланирования (гидроскольжения) составляет около 97 км/ч. То есть попавший в ДТП человек может выбирать между формулировками «не справился с управлением» или «превысил скорость».
Модифицированная формула Горна
В 1986 году Горном и соавторами [3] вместо старой зависимости была предложена модифицированная эмпирическая зависимость критической скорости аквапланирования от давления в шине и конфигурации пятна контакта шины с дорогой в виде
![]()
где vP – критическая скорость аквапланирования, км/ч, F – соотношение пятна контакта (отношение ширины пятна контакта к его длине), P – давление воздуха в шине, кг/см2.
Геометрия пятна контакта современных шин в 2013 году исследована сотрудниками МАДГТУ (МАДИ) [4, 5], которыми получены данные по геометрии пятна контакта для различных величин давления в шинах. Так, для давления 2 кг/см2, соотношение пятна контакта составляет F=0.48, и из модифицированной эмпирической зависимости Горна следует, что критическая скорость аквапланирования (гидроскольжения) составляет уже около 70 км/ч.
Уже теплее.
Модель PAVDRN в рамках Национальной программы совместных исследований в области автомобильных дорог (NCHRP) США
В 1998 году в рамках NCHRP (National Cooperative Highway Research Program – Национальной программы совместных исследований в области автомобильных дорог) была разработана PAVDRN – компьютерная модель, которая определяет скорость аквапланирования автомобиля. Модель предназначена для использования дорожными инженерами для проектирования и анализа профиля дороги. Модель PAVDRN базируется на исследовании Галавея и соавторов [6] (1979 г.), развитом далее Генри и Мейером [7] (1980 г.) и Хюбнером с соавторами [8] (1986 г.).
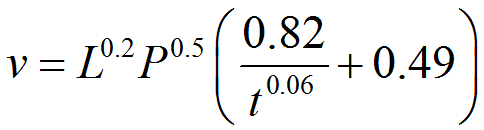
Для толщины водяной пленки на дороге менее 2.4 мм согласно модели PAVDRN скорость аквапланирования автомобиля определяется формулой
![]()
где v – скорость в км/ч, t – толщина пленки воды на дороге в мм.
Для толщины водяной пленки больше или равной 2.4 мм скорость аквапланирования автомобиля, с учетом обозначений выше, определяется формулой
![]()
где А – наибольшее из значений
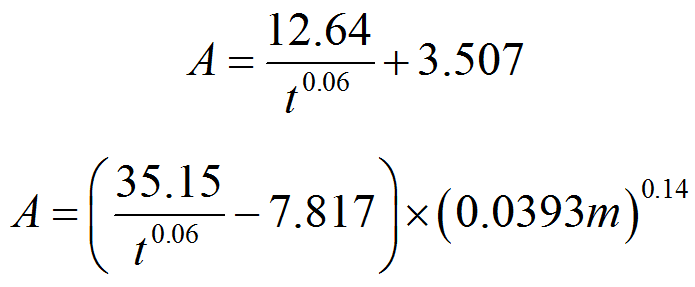
где m – высота неровностей макротекстуры дороги в мм.
Согласно «Рекомендациям по устройству дорожных покрытий с шероховатой поверхностью», утвержденным Минтрансом РФ [9], допустимая средняя глубина впадин макрошероховатости для дорог в различных дорожно-климатических зонах не превышает 0.45 мм. Тогда, для значения высоты неровностей макротекстуры дороги мм, график зависимости скорости аквапланирования автомобиля от толщины пленки воды по модели PAVDRN имеет вид, показанный на рисунке ниже.
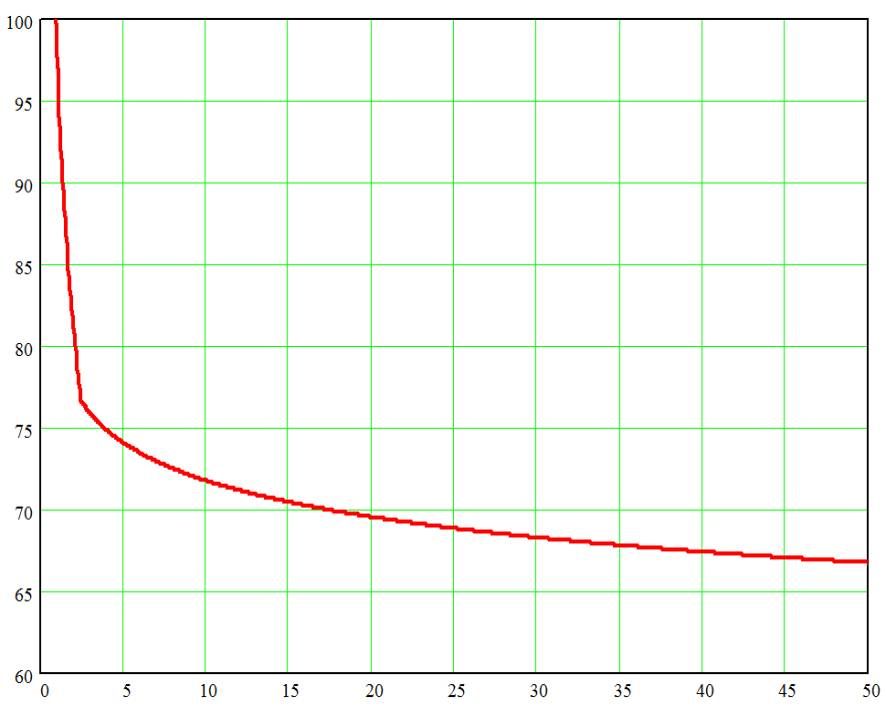
Из зависимости модели PAVDRM следует, что, например, при толщине водяной пленки 10 мм скорость аквапланирования автомобиля примерно составляет 72 км/ч, при толщине водяной пленки 20 мм – 69 км/ч, при толщине водяной пленки 40 мм – 67 км/ч.
Исследования Онга и Фуа для заторможенного гладкого колеса
В диссертации Онга [10], защищенной в 2006 году в Национальном университете Сингапура, и ряде работ Онга и Фуа [11-14], опубликованных ими в 2006-2008 годах были представлены результаты исследований аквапланирования заторможенного колеса с гладкой контактной поверхностью (без протектора), выполненных моделированием аквапланирования методом конечных элементов.
В результате исследований Онгом и Фуа получена следующая формула для зависимости скорости аквапланирования заторможенного гладкого колеса от нагрузки на колесо и давления в шине как расширение модели PAVDRN
где L – нагрузка на колесо в н, P – давление в шине колеса в кПа, t – толщина водяной пленки в мм.
Для, например, автомобиля Land Rover нагрузка на колесо может быть определена как сумма снаряженной масса автомобиля 2485 кг и водителя 95 кг, деленная на 4 и умноженная на ускорение силы тяжести 9.8 м/с2, или составляет 6321 н. При давлении в шинах 2 кг/см2 или 196.2 кПа зависимость Онга и Фуа для автомобиля Land Rover при условии его заторможенного состояния показана на рисунке ниже.
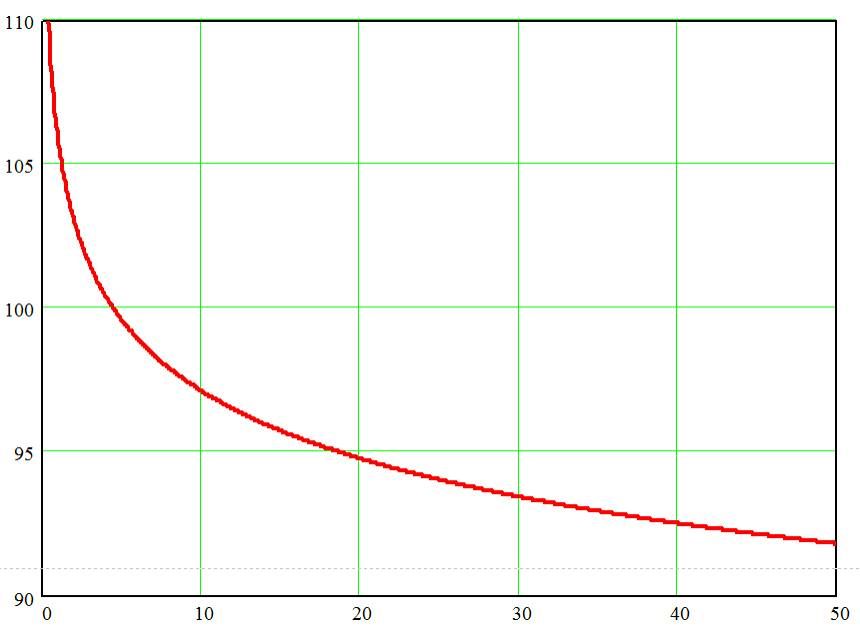
Из зависимости Онга и Фуа следует, что, например, при толщине водяной пленки 10 мм скорость аквапланирования заторможенного автомобиля Land Rover составляет 97.1 км/ч, при толщине водяной пленки 20 мм – 94.8 км/ч, при толщине водяной пленки 40 мм – 92.5 км/ч.
Полученные значения скорости аквапланирования автомобиля Land Rover из формулы Онга и Фуа больше, чем соответствующие значения для одинаковой толщины водяной пленки из формул PAVDRM 72 км/ч, 69 км/ч и 67 км/ч. Это означает, что при движении с разрешенной скоростью не более 90 км/ч и при блокировке колес после начала аквапланирования, автомобиль Land Rover, например, мог бы быть выведен из состояния аквапланирования, но наличие антиблокировочной системы торможения исключает это.
Подобные приведенному выше обзоры научной и экспертной литературы так же содержатся в отчете [15], выполненном в 2012 году по заказу Департамента транспорта штата Флорида, США и имеющимся в свободном доступе в электронной библиотеке Национального управления по безопасности движения автомобильного транспорта США, рекомендованной для использования Минтрансом РФ, РФЦСЭ МЮ РФ и ЭКЦ МВД РФ [16].
Литература:
- Horne, W.B. and Dreher, R.C. Phenomena of Pneumatic Tire Hydroplaning // NASA TN D-2-56, NASA Langley Research center, NASA, Hampton, Va. 1963.
- Коллинз Д., Моррис Д. Анализ дорожно-транспортных происшествий. // М.: «Транспорт», 1971.
- Horne, W.B., Yager, T.J., and Ivey, D.L. Recent Studies to Investigate Effects of Tire Footprint Ratio on Dynamic Hydroplaning Speed. // The Tire Pavement Interface (M.G. Pottinger and TJ. Yager, eds.), ASTM STP 929, ASTM, West Conshohocken, Pa., pp. 26-46. 1986.
- Васильев Ю.Э., Каменев В.В., Беляков А.Б., Кольников И.В. Особенности измерения пятна контакта на круговом испытательном стенде КУИДМ-2. // Молодой учёный. Вып. 10 (57), 2013. – С. 114-117.
- Каменев В.В., Васильев Ю.Э., Беляков А.Б., Кольников И.В. Испытания на стационарной системе для фото и видео фиксации пятна контакта шины Кругового Универсального Испытательного стенда Дорожных Материалов (КУИДМ-2). // Науковедение. Вып. 6, ноябрь – декабрь 2013.
- Gallaway B.M., Ivey D.L., Hayes G.G., Ledbetter W.G., Olson R.M., Woods D.L. and Schiller R.E. “Pavement and Geometric Design Criteria for Minimizing Hydroplaning” // 1979, FHWA RD-79-31, 278 pp.
- Henry J.J. and Meyer W.D. “The Simulation of Tire Traction of Wet Pavements” // 1980, 18th International Automobile Technical Congress, Hamburg, Germany, Proc., No 269, pp. 121-128.
- Huebner R.S., Reed J.R. and Henry J.J. “Criteria for Predicting Hydroplaning Potential” // Journal of Transportation Engineering, 112, 1986, 549-553.
- Рекомендации по устройству дорожных покрытий с шероховатой поверхностью. Утв. Минтрансом России от 5 января 2004 г.
- Ong G. P. Hydroplaning and skid resistance analysis using numerical modeling, Ph.D. Dissertation, National University of Singapore, 2006.
- Ong G.P. and Fwa T.F. “Analysis of Effectiveness of Longitudinal Grooving Against Hydroplaning” // Transportation Research Record 1949. Transportation Research Board of the National Academies, 2006, Washington, D.C., pp. 113-125.
- Ong G.P. and Fwa T.F. “Effectiveness of Transverse and Longitudinal Pavement Grooving in Wet-Skidding Contro.”, Transportation Research Record 2005, Transportation Research Board of the National Academies, 2007, Washington, D.C., pp. 172-182.
- Ong G.P. and Fwa T.F. “Wet-pavement hydroplaning risk and skid-resistance: Modeling”, ASCE Journal of Transportation Engineering, 2007, Vol. 133, No. 10, October.
- Ong G.P and Fwa T.F. (2008). “Modeling and Analysis of Truck Hydroplaning on Highways, Transportation Research Record, Issue 2068, 2008, pp. 99-108.
- Giuiaratne M., Lu Q., Yang J., Mjetz J., Jayasooriya W., Yassin M. and Amarasiri S. Hydroplaning on Multi Lane Facilities. Report № BDK84 977-14. Department of Civil and Environmental Engineering College of Engineering University of South Florida. Tampa, FL 33620. // Florida Department of Transportation, 605 Suwannee St. MS 30, Tallahassee, FL 32399.
- Методические рекомендации по проведению независимой технической экспертизы транспортного средства при ОСАГО №001МР/СЭ (утв. ГНИИ АТ Минтранса РФ, РФЦСЭ МЮ РФ, ЭКЦ МВД РФ, НПСО «Объединение транспортных экспертов»), 2004г.

Уважаемый Владимир Николаевич!
Вам доводилось применять знания о динамическом гидроскольжении в практической экспертизе?