
Эта лекция написана по материалам статьи Neptune, J. and Flynn, J., «A Method for Determining Crush Stiffness Coefficients from Offset Frontal and Side Crash Tests,» SAE Technical Paper 980024, 1998, doi:10.4271/980024.
Алгоритм CRASH3 широко используется в качестве инструмента для реконструкции обстоятельств ДТП. Анализ поврежденной части автомобиля с помощью CRASH3 дает количественную оценку изменения скорости автомобиля во время фазы его деформирования. Степень полезности алгоритма, однако, зависит от наличия действительных коэффициентов жесткости рассматриваемой части конструкции автомобиля.
Как следует из предыдущих лекций, коэффициенты жесткости передней части автомобиля достаточно легко и прямо определяются с помощью анализа краш-теста автомобиля на фронтальный удар. Так же, с использованием аналогичной процедуры, могут быть определены коэффициенты жесткости боковой части автомобиля по данным краш-теста на удар автомобиля боком в неподвижный жесткий столб. Следует отметить, что лабораторный столб, так же как и неподвижный жесткий барьер для фронтальных краш-тестов, разделен по своей высоте на ячейки, данные для каждой из которых могут быть получены с помощью специального программного обеспечения NHTSA, а жесткость боковой части автомобиля – дифференцирована.
Достоинством краш-тестов на боковой удар автомобиля в неподвижный жесткий столб является получение данных по жесткости бока от порога до крыши. Однако, недостатком является то, что удар, как правило, производится серединой передней двери, а жесткость конструкции автомобиля в районе стоек кузова или элементов подвески может быть больше. Этот недостаток компенсируется производством краш-тестов на удар в неподвижный автомобиль лабораторной тележкой MDB (Moving Deformable Barrier), жесткость которой однородна и известна.
Задача этой лекции – показать, как, исходя из известной жесткости лабораторной тележки MDB и ее неоднородной фактической деформации, дифференцированно установить жесткость боковой части автомобиля. Аналогично – как, исходя из известной жесткости (однородной или уже дифференцированной) передней части ударяющего автомобиля и фактической деформаций этой передней части, дифференцированно установить жесткость боковой части ударяемого автомобиля конкретно для данных условий ДТП.
Для применения рассматриваемой методики должны быть выполнены условия:
1. Коэффициенты жесткости для ударяющего автомобиля являются известными или могут быть определены из данных краш-тестов.
2. Деформированные профили ударяющего и ударяемого автомобиля известны.
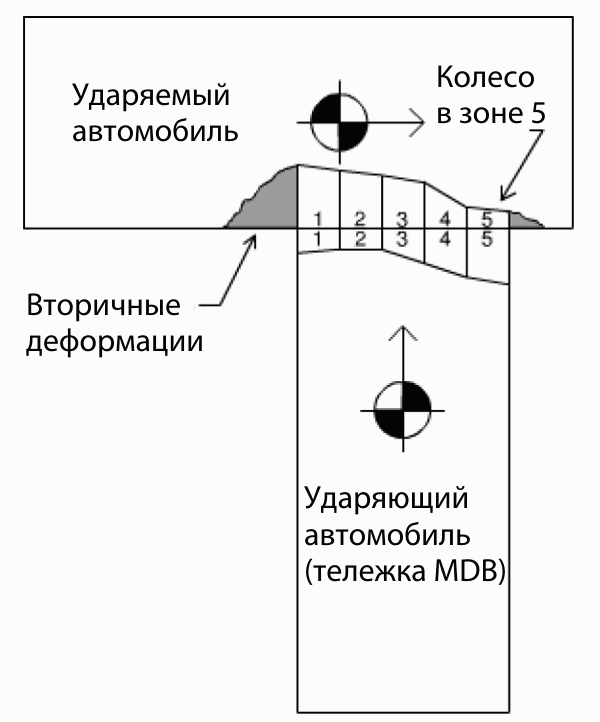
3. Деформированные профили обоих автомобилей можно разделить на зону непосредственного контакта и зоны вторичных деформаций, вызванных ударом в зоне непосредственного контакта. Зона вторичных деформаций – зона, где деформирующие силы непосредственно не прикладывались.
4. Зона непосредственного контакта на обоих автомобиля имеет одинаковую ширину.
5. Зону непосредственного контакта на обоих автомобилях можно разделить на одинаковые по ширине соответствующие участки так, что во время деформации каждый участок одного автомобиля контактировал с соответствующим участком другого автомобиля.
Методика состоит в следующем:
1. Зоны непосредственного контакта делятся на участки таким образом, что участки на ударяющем автомобилей совпадают с соответствующими участками на ударяемом автомобиле.
2. Силы удара определяется для каждого участка зоны непосредственного контакта ударяющего автомобиля.
3. Сила удара для каждого участка зоны непосредственного контакта ударяющего автомобиля, согласно третьему закону Ньютона (действие равно противодействию), считается равной силе удара на каждом соответствующем участке ударяемого автомобиля.
4. Коэффициенты жесткости конструкции ударяемого автомобиля определяются дифференцированно для каждого участка зоны непосредственного контакта.
Таким образом, первый этап включает разделение деформированных профилей транспортных средств на зоны непосредственного контакта и вторичных деформаций, индуцированных ударом. Зона непосредственного контакта – это деформированная часть поверхности транспортного средства, к которой во время удара была приложена внешняя сила. Зоны вторичных деформаций – это часть поверхности транспортного средства, к которой во время удара не прикладывались внешние силы.
Зона непосредственного контакта делится на участки в зависимости от внутренней структуры силовых элементов обоих транспортных средств так, чтобы в пределах каждого участка можно было полагать жесткость конструкции однородной. Например, участок панели двери, участок стойки кузова, участок колеса и подвески, и т.д.
Второй этап включает определение силы удара, которая действовала на каждом участке зоны непосредственного контакта ударяющего автомобиля (он далее обозначается цифрой 1) по следующей формуле
 где
гдеi – номер участка зоны непосредственного контакта,
F1i – пиковое значение силы на i-ом участке,
L1i – ширина участка,
a1 – угол между направлением силы удара и нормалью к недеформированной поверхности транспортного средства,
A1i и B1i – коэффициенты жесткости ударяющего транспортного средства, усредненные и одинаковые для каждого i-го участка, или дифференцированные для каждого i-го участка,
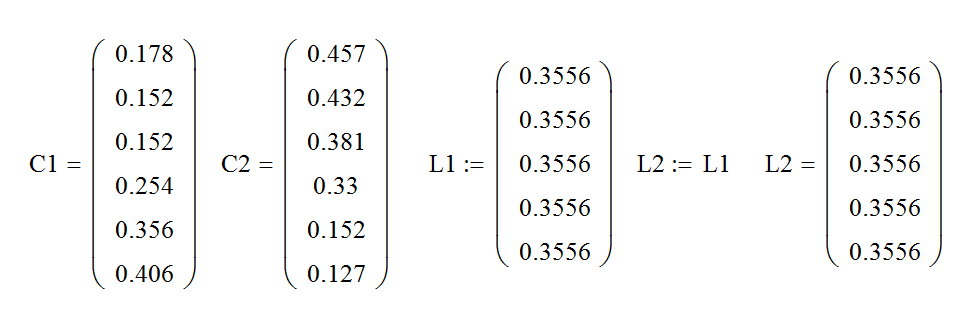
C1i и C1i+1 – деформации на границах i-го участка.
На третьем этапе записывается выражение равенства сил на каждом участке зоны непосредственного контакта автомобиля 1 (ударяющего) и автомобиля 2 (ударяемого), или F1i=F2i.
Здесь возникает проблема – уравнение для третьего закона Ньютона одно, а неизвестных задачи два. Это – коэффициенты жесткости ударяемого автомобиля 2, дифференцированные или усредненные. Затруднение обходится тем, что вместо них задаются, в разумных пределах, значения скоростей нулевой деформации b0, а затем вычисляются коэффициенты b1 (см. материал первой и второй лекций).
Почему коэффициенты b0 «задаются в разумных пределах»? Потому что они не оказывают существенного влияния на результат определения затрат энергии на деформацию. При более строгом подходе, коэффициент b0 можно определить из краш-теста на удар боком в столб, вспомнив, что b0 – это и скорость отброса за счет остаточной упругой энергии, или вычислить, в том числе дифференцированно для каждого участка, методом конечных элементов.
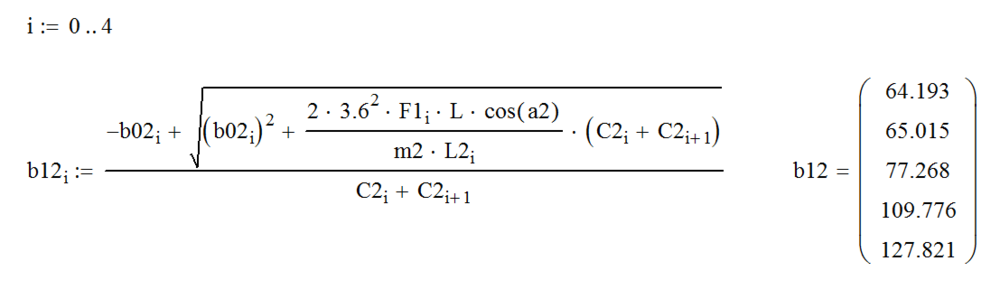
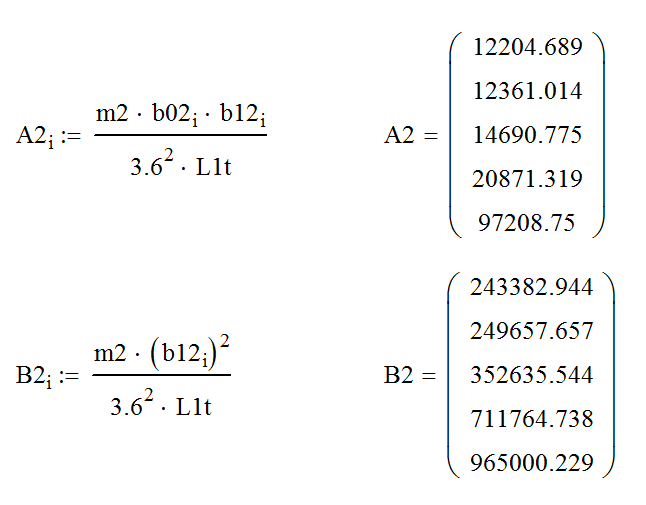
Итак, задав, или получив набор коэффициентов bO2 для автомобиля 2 (ударяемого), набор коэффициентов b12 для каждого его i-го участка можно получить по формуле, вытекающей из решений квадратного уравнения
 где
гдеbO2i – значение скорости нулевой деформации для i-го участка автомобиля 2 (ударяемого),
L – длина зоны непосредственного контакта,
Li – длина i-го участка,
Fi – пиковое значение силы на i-ом участке,
m2 – масса автомобиля 2 (ударяемого),
C2i и C2i+1 – деформации на границах i-го участка автомобиля 2 (ударяемого).
И наконец, на четвертом этапе, с учетом обозначений выше коэффициенты жесткости конструкции ударяемого автомобиля 2 определяются дифференцированно для каждого i-го участка зоны непосредственного контакта по формулам

Пример
Установим жесткость ударяемого автомобиля для столкновения, показанного на рисунке выше.Как видно из рисунка, зона непосредственного контакта была разделена на 5 участков равной длины 14 дюймов или 0.3556м. При этом участок 5 явно жестче, чем участки 1-4, так как там располагается колесо ударяемого автомобиля 2. Суммарная длина зоны непосредственного контакта составляет L=1.778 м.
Масса ударяющего автомобиля 1 составляла m1=1588 кг, ударяемого автомобиля 2 – m2=1361 кг.
Значение угла между направлением силы удара и нормалью к недеформированной поверхности транспортного средства для автомобиля 1 (ударяющего) было a1=-20 градусов, для автомобиля 2 (ударяемого) было a2=20 градусов.
Жесткость передней части автомобиля 1 (ударяющего) известна и определяется коэффициентами A1=35023.6 н/м, B1=517049 н/м2.
Чтобы читать дальше, экспертам придется вспомнить матричную алгебру, а тем, кто не знает, что это за часть высшей математики, сбегать на курсы или в библиотеку.
Значения деформаций на границах участков и длины участков заданы в виде векторов
 Силы на каждом i-м участке зоны непосредственного контакта на автомобиле 1 (ударяющем) и суммарно составляли (в ньютонах)
Силы на каждом i-м участке зоны непосредственного контакта на автомобиле 1 (ударяющем) и суммарно составляли (в ньютонах)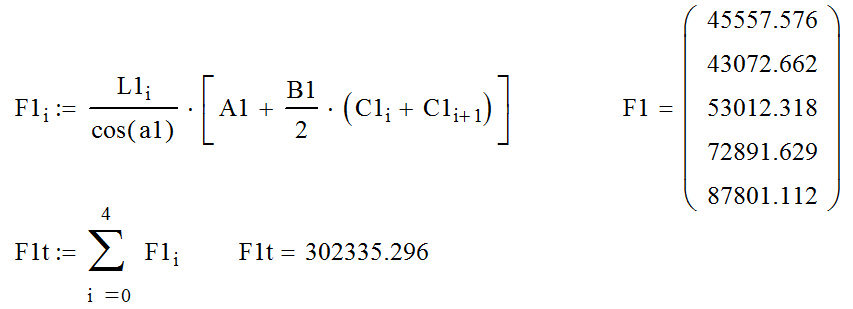 Как видно, значения силы минимально на участке 2 и составляет около 4.3 т, и максимально на участке 5 (там, где колесо) около 8.8 т. Суммарная сила в зоне непосредственного контакта составила около 30 т.
Как видно, значения силы минимально на участке 2 и составляет около 4.3 т, и максимально на участке 5 (там, где колесо) около 8.8 т. Суммарная сила в зоне непосредственного контакта составила около 30 т. Полагаем (внимание – это учебная задача, а не фактические данные!), что скорость b0 нулевой деформации для автомобиля 2 (ударяемого) на участках 1-4 составляет 2 мили в час, или 3.219 км/ч, а на жестком участке 5 – 8 миль в час, или 12.876 км/ч. Тогда коэффициенты b1 для участков автомобиля 2 (ударяемого) составляют, в км/ч/м
 То есть жесткость структуры автомобиля 2 (ударяемого) в районе колеса существенно больше жесткости панели двери.
То есть жесткость структуры автомобиля 2 (ударяемого) в районе колеса существенно больше жесткости панели двери.И, наконец, дифференцированные жесткости участков автомобиля 2 (ударяемого) составляют
 Проверим результат, вычислив значения сил на каждом участке автомобиля 2 (ударяемого)
Проверим результат, вычислив значения сил на каждом участке автомобиля 2 (ударяемого) 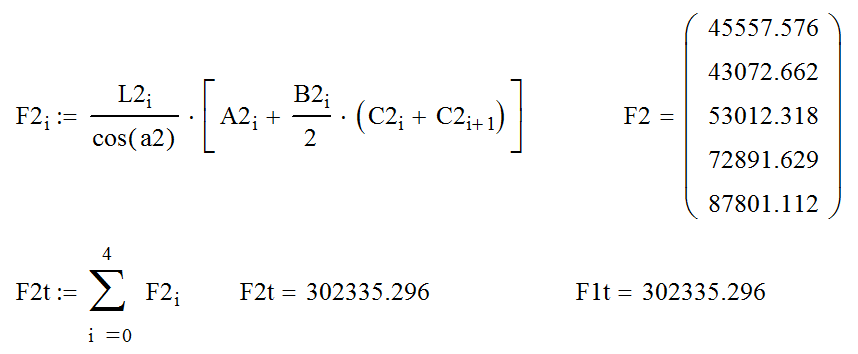 Как видим, значения сил на каждом участке автомобиля 2 (ударяемого), и суммарная величина силы в точности равны значению сил на каждом участке автомобиля 1 (ударяющего) и суммарной величине его силы. То есть, третий закон Ньютона выполнен и задача решена – исходя из известной жесткости одного их транспортных средств и деформаций обоих транспортных средств установлена неизвестная жесткость другого транспортного средства, причем, установлена дифференцированно по выделенным участкам.
Как видим, значения сил на каждом участке автомобиля 2 (ударяемого), и суммарная величина силы в точности равны значению сил на каждом участке автомобиля 1 (ударяющего) и суммарной величине его силы. То есть, третий закон Ньютона выполнен и задача решена – исходя из известной жесткости одного их транспортных средств и деформаций обоих транспортных средств установлена неизвестная жесткость другого транспортного средства, причем, установлена дифференцированно по выделенным участкам.Решенный пример и теория полезны для экспертов тем, что теперь они могут установить жесткость бока автомобиля исходя из отчета о краш-тесте на удар тележкой MDB. Им рекомендуется изучить отчет о краш-тест №7602 на боковой удар автомобиля Toyota Yaris, так как в следующей лекции будет рассмотрена реальная задача.

А адвокаты теперь знают, что для реконструкции любого ДТП достаточно знать жесткость хотя бы одного из участвовавших автомобилей, и смогут пресечь любые инсинуации госэкспертов о том, что «науке это неизвестно».
Предыдущая лекция "Алгоритм CRASH3. Как дифференцировать жесткость автомобиля".
Все статьи автора на сайте «Праворуб».
Добавлено: 20:09 27.03.2015
Следующая лекция "Алгоритм CRASH3. Используем европейские краш-тесты"

Как всегда — отличная лекция и пособие для подготовки вопросов эксперту и допросу эксперта.
Когда-то их наших ПДД незаметно исчез пункт «Каждый участник дорожного движения, соблюдающий настоящие Правила, вправе рассчитывать на то, что и другие участники дорожного движения будут выполнять содержащиеся в них требования». Он остался в ПДД Белоруссии.
С тех пор исчезла необходимость экспертным путем установить скорость автомобиля, имевшего приоритет. Поэтому для ДТП на картинке госэксперт будет:
- устанавливать обстоятельства (скорости) путем каббалистических заклинаний и махания руками в воздухе (вероятность 98%);
— что-то посчитает по длине тормозных следов, если они есть (вероятность 1.5%);
— реально что-то установит (менее 0.5%).
Тем не менее, вынести мозг эксперту и суду рекомендованными МЮ новыми методиками вполне реально.
Вот пример такой судебной практики. Первый едет прямо, второй навстречу налево. Первый в гололед едет больше 84км/ч, второй — около 24 км/ч. Суд признает второго виновным в том, что он не уступил дорогу, но учет вины потерпевшего делает в пропорции 0% к 100% — полностью удовлетворяет иск того, кто не уступил, так как опасную ситуацию создал другой водитель.
Так что, уважаемый Иван Николаевич, «выносить мозг» с помощью моих пособий действительно можно и нужно.